実橋で斜張橋ケーブル点検ロボットによる実証実験を実施
―高精度の点検結果と大幅な作業時間短縮を確認―
三井住友建設株式会社(東京都中央区佃二丁目1番6号 社長 新井 英雄)は、斜張橋ケーブル点検ロボット(※1)による実証実験を、せいたかしぎ橋(埼玉県越谷市)(※2)で山口大学と共同実施し、作動性に加え高精度の点検結果と大幅な作業時間短縮を確認しました。
(※1) 茨城工業高等専門学校と山口大学と共同開発
(※2) PC3径間連続エクストラドーズド橋

【実証実験の様子】
■ 斜張橋ケーブル点検ロボットの特徴
本点検ロボットは、ビデオカメラと自動制御装置を組み合わせた撮影ユニットとUAV(無人航空機)の昇降ユニットで構成されています。UAVによってケーブルを上昇し、最頂部で両ユニットが切り離され、自動落下する昇降ユニットに続き、自動制御された撮影ユニットが等速降下しながら1台あたり120°の範囲を撮影するビデオカメラ4台によってケーブル全周をくまなく記録します。
また、撮影した動画(画像)は、地上部での回収後すぐに画像結合システムによりパノラマ画像化することができるので、その場でケーブル損傷の部位と程度を確認することができます。
 【斜張橋ケーブル点検ロボット】 |
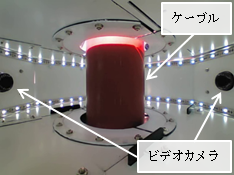 【撮影ユニット内部】 |
■ 実橋での実証実験による成果
【1】点検結果をその場で確認して迅速に診断
本実験で撮影された動画は、画像結合システムにより約10分程でパノラマ画像化され、実験後すぐにケーブルの全長と全周(死角0(ゼロ))の状況をその場で確認できました。ケーブル表面状況の可視化により、迅速に目視点検と同等レベルの観察ができることを確認しました。
【2】点検作業時間の大幅短縮を実現
UAVでケーブル最頂部まで短時間で上昇するため、点検作業開始までの時間はほとんど必要としません。撮影ユニットの自動制御による等速降下点検は最速9m/分のため、国内最大規模のPC斜張橋(150m程度のケーブル長)でも30分程で点検作業が可能であることを確認しました。また、1台の昇降ユニットによる上昇作業を繰り返すことで、複数の撮影ユニットを同時に使用することが可能で、ケーブル全体の点検時間を短縮することができます。
【3】最小限の交通規制で点検が可能なコンパクトサイズ
最小クラスのケーブル径を対象とした今回の実証実験は、UAV翼端距離1,000mmサイズの点検ロボット使用で、交通規制を一切行わず実施しました。ケーブル径に合せてUAV翼端距離が大きくなりなりますが、最小限の交通規制で点検ができ、橋の形状などの条件によっては交通規制無しでの点検も可能です。
【4】あらゆる傾斜角度のケーブル点検が可能
本実験を行った実橋(せいたかしぎ橋)のケーブルの傾斜角度は約15度と緩い勾配でしたが、自動落下する昇降ユニット、自動制御されて等速降下する撮影ユニット共に作動性に問題はなく、あらゆる傾斜角度のケーブルでの点検が可能であることを確認しました。
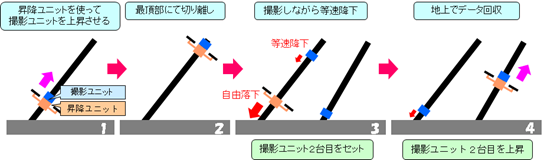
【ケーブルの点検方法イメージ】
■ 今後の展開
今回の実橋での実証実験により、本格的な斜張橋の定期点検業務への活用に目処をつけました。今後は主塔の点検を可能にする前方カメラ搭載タイプなど、社会インフラの点検業務を安全かつ確実に行う効率的なシステムの技術開発を積極的に推進してまいります。
<お問い合わせ先>
リリースに記載している情報は発表時のものです。
 ニュースリリース PDF
ニュースリリース PDF