橋梁の自動点検を可能にする自走式ロボットカメラを開発
― 橋梁維持管理の省力化を実現 ―
三井住友建設株式会社(東京都中央区佃二丁目1番6号 社長 新井 英雄)は、すでに販売を開始している「橋梁点検ロボットカメラ:懸垂型」(※1)を使用し、橋梁側面を自動点検する自走式装置を開発しました。これまで、ロボットカメラによる点検は、点検者がカメラを操作し、点検場所ごとに設置・点検(撮影)・撤去の作業を繰り返していましたが、本装置を使用することによって、カメラ設置後は、撮影と移動の一連の作業を自動で行えるようになり、大幅な省力化を実現します。神奈川県内の橋梁建設現場や、兵庫県の実橋(※2)で実証を行い、装置の実用化に向けて目途をつけました。
 【橋梁建設現場での実証の様子】 |
 【実橋での実証の様子】 |
■ 本装置の特徴
(1) 容易な設置・撤去作業
自走式装置を構成する部材は軽量で、人力搬入できます。高欄への組み立て作業は2人程度で容易に行えます。
(2) 自走移動を繰り返しながら自動撮影
「橋梁点検ロボットカメラ」の自動首振り撮影機能(※3)と、撮影終了を感知し、次の点検場所に自走移動する装置の組み合わせにより、無人点検を可能としました。
(3) 現場作業を単純化
従来のロボットカメラを用いた点検では、カメラを操作する点検員が必要で、その場で操作端末を見ながら損傷を探すスタイルが一般的でした。この自走式装置を用いることで、現場では、カメラの設置・撤去のみを行い、高度な技術力を必要とする損傷の確認作業は、点検作業後、室内作業で行うことになります。すべての画像を規則的に取得しているため、損傷の位置特定が容易であり、また、損傷がないことのエビデンスにも使えます。
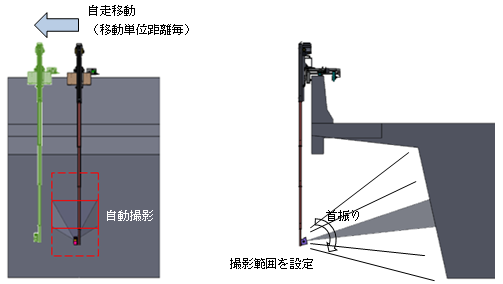
【自走式装置とロボットカメラの動き】
■ 今後の展開
当社は、今後、ますます膨大化していく老朽化橋梁の維持管理業務の効率化を図るため、さらなる省力化を実現する橋梁点検装置の開発を推進しています。
(※1) 橋梁点検ロボットカメラ:懸垂型
当社と株式会社日立産業制御ソリューションズが共同で開発した社会インフラ用点検装置。
(※2) 兵庫県の実橋
内閣府総合科学技術・イノベーション会議の「戦略的イノベーション創造プログラム(SIP)インフラ維持管理・更新・マネジメント技術」において、地域実装支援チーム(管理法人:JST)として参加している神戸大学に兵庫県が協力して実橋にて実証実験が行われ、本装置も参加しました。
(※3) 自動首振り撮影機能
所定のひび割れ幅が取得可能な画角(例えば、0.1mmのひび割れ幅であれば、400×250mm程度)を設定し、次に撮影(点検)範囲を指定することで、カメラが自動首振りをし、分割された拡大画像を取得する機能
<お問い合わせ先>
リリースに記載している情報は発表時のものです。
 ニュースリリース PDF
ニュースリリース PDF